
- 到目前为止我们默认数据都来自于某种分布,并且所有样本都是独立同分布的。然而,大多数的数据并非如此。例如,文章中的单词是按顺序写的,如果顺序被随机地重排,就很难理解文章原始的意思。
- 我们不仅仅可以接收一个序列作为输入,而是还可能期望继续猜测这个序列的后续。
- 如果说卷积神经网络可以有效地处理空间信息,那么循环神经网络(recurrent neural network,RNN)则可以更好地处理序列信息。循环神经网络通过引入状态变量存储过去的信息和当前的输入,从而可以确定当前的输出。
1 序列模型
1.1 统计工具
- 以股票价格(富时100指数)为例。

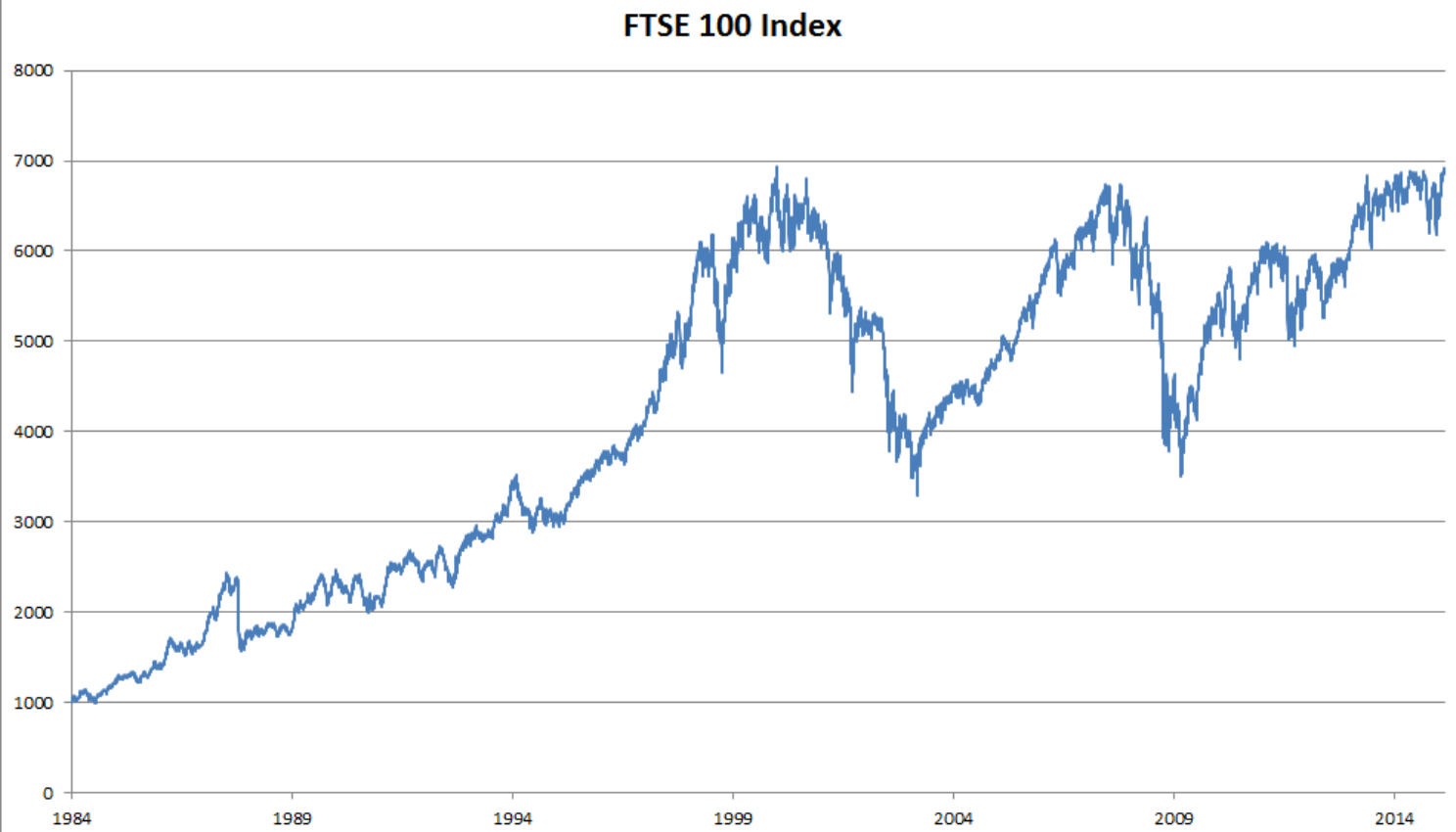
- 在时间步t观察到的价格为$x_ t$。t对于本文中的序列通常是离散的,并在整数或其子集上变化。假设一个交易员想在t日的股市中表现良好,于是通过以下途径预测xt:
$$x_ t ∼ P(x_ t | x_ {t−1}, . . . , x_ 1)$$
- 在时间步t观察到的价格为$x_ t$。t对于本文中的序列通常是离散的,并在整数或其子集上变化。假设一个交易员想在t日的股市中表现良好,于是通过以下途径预测xt:
1.1.1 自回归模型
输入数据的数量将会随着我们遇到的数据量的增加而增加,因此需要一个近似方法来使这个计算变得容易处理。如何有效估计P(xt | xt−1, . . . , x1),归结为以下两种策略。
假设在现实情况下相当长的序列 xt−1, . . . , x1可能是不必要的,因此我们只需要满足某个长度为$\tau$的时间跨度。这种模型被称为自回归模型(autoregressive models),因为它们是对自己执行回归。
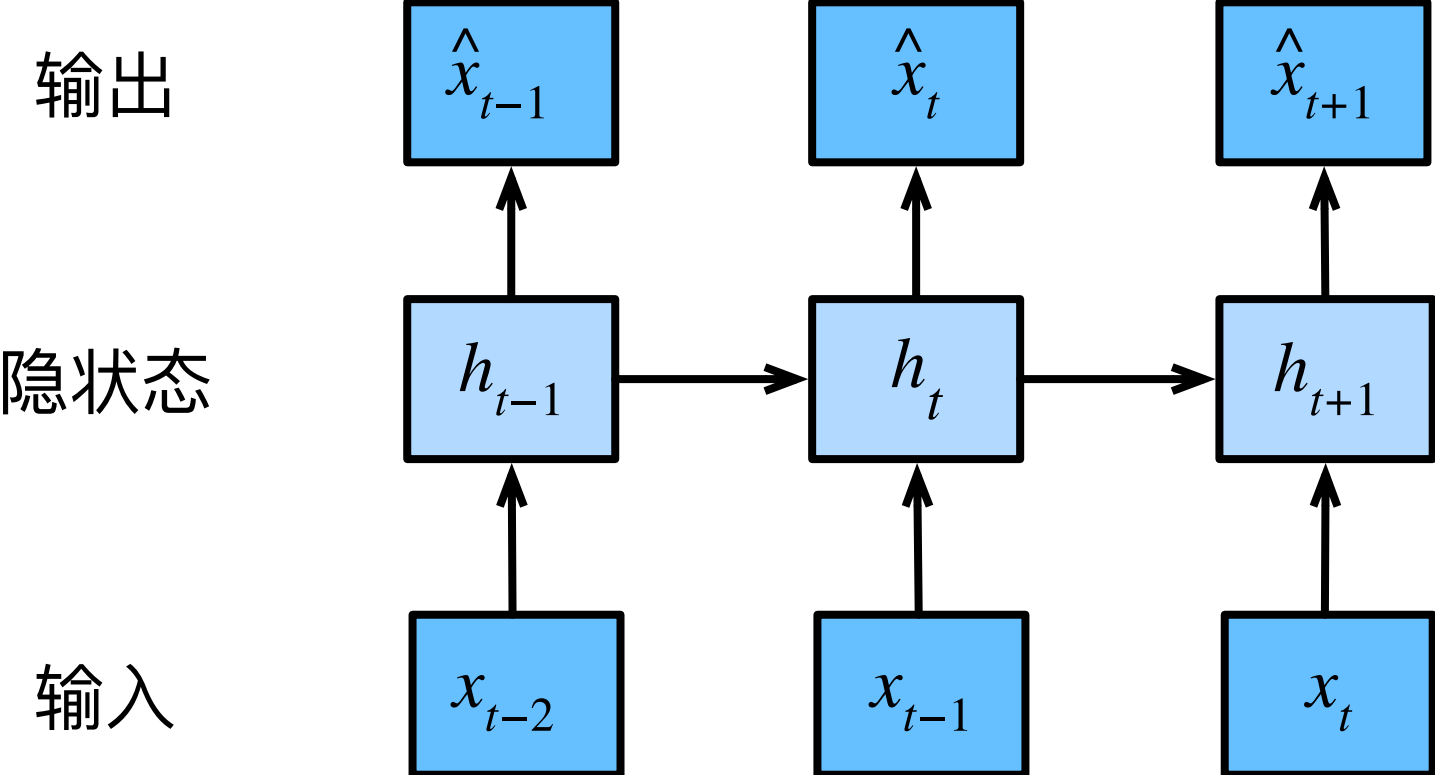
如下图是保留一些对过去观测的总结$h_ t$,并且同时更新预测$\hat x_ t$的模型和总结$h_ t$。即:基于$\hat x_ t = P(x_ t | h_ t)$估计$x_ t$, 并使用$h_ t = g(x_ {t−1}, h_ {t−1})$来更新模型。由于$h _t$从未被观测到,这类模型也被称为 隐变量自回归模型(latent autoregressive models)。

这两种情况都有一个显而易见的问题:如何生成训练数据?可以使用历史观测来预测下一个未来观测。整个序列的估计值都将通过以下的方式获得:
$$P(x_ 1, . . . , x_ T) = \prod {t=1} ^T P(x t | x_ {t−1}, . . . , x_ 1)$$
1.1.2 马尔可夫模型
在自回归模型的近似法中,我们使用$x_ {t-1},\cdots,x_ {t - \tau}$而不是$x_ {t-1},\cdots,x_ 1$来估计$x_ t$。我们称这个模型为马尔可夫模型。如果$\tau = 1$,那么这个模型就是一阶马尔可夫模型:
$$P(x_ 1, . . . , x_ T) = \prod {t=1} ^T P(x t | x_ {t−1})$$$$P(x_ 1 | x_ 0) = P(x_ 1)$$
假设$x_ t$仅是离散值,使用动态规划可以沿着马尔可夫链精确地计算结果。例如,我们可以高效地计算$P(x_ {t+1} | X_ {t-1})$:
$$\begin{aligned} P(x_ { t + 1 } | x_ { t - 1 }) &= \frac { \sum { x t } P( x_ { t + 1 }, x_ t, x_ { t - 1 }) } { \sum { x t, x_ { t - 1 } } P( x_ { t + 1 }, x_ t, x_ { t - 1 }) } \\ &= \frac { \sum { x t } P( x_ { t + 1 } | x_ t, x_ { t - 1 }) P( x_ t | x_ { t - 1 }) P( x_ { t - 1 }) } { \sum { x t } P( x_ { t + 1 } | x_ t, x_ { t - 1 }) P( x_ t | x_ { t - 1 }) P( x_ { t - 1 }) } \\ &= \sum { x t } P( x_ { t + 1 } | x_ t ) P( x_ t | x_ { t - 1 }) \end{aligned}$$对$x_ t$求和结果为1,相当于求和符号与$x_ t$可以消掉。
1.1.3 因果关系
- 通常,可以将$P(x_ 1, \cdots, x_ T)$倒序展开:
$$P(x_ 1, \cdots, x_ T) = \prod {t=T} ^1 P(x t | x_ {t+1}, \cdots, x_ T)$$ - 如果基于一个马尔可夫模型,我们还可以得到一个反向的条件概率分布。但通常数据存在一个自然的方向,即在时间上是前进的。
1.2 训练
- 使用正弦函数和一些可加性噪声来生成序列数据,时间步为1, 2, . . . , 1000。
1 | import os |


- 将这个序列转换为模型的特征-标签(feature‐label)对。将数据映射为数据对$y_ t = x_ t$和 \mathbf{ x }_ t = [x_ { t - \tau }, \cdots, x_ { t - 1 }]$。这比我们提供的数据样本少了$\tau$个,在这里,我们仅使用前600个“特征-标签”对进行训练。
1 | tau = 4 |
- 构建一个简单的模型:
- 两个全连接层的多层感知机,ReLU激活函数和平方损失。
1 | # 初始化权重 |
- 训练
1 | def train(net, train_iter, loss, epochs, lr): |
epoch 1,loss:0.093809
epoch 2,loss:0.058604
epoch 3,loss:0.052532
epoch 4,loss:0.058827
epoch 5,loss:0.049325
1.3 预测
- 可以看到训练损失很小,因此我们期望模型能有很好的工作效果。单步预测:
1 | onestep_preds = net(features) |


- 对于直到$x_ t$的观测序列,其在时间步t + k处的预测输出$\hat x_ {t+k}$称为k步预测。
- 由于我们的观察已经到了x604,我们必须使用我们自己的预测(而不是原始数据)来进行多步预测。
1 | multistep_ppreds = torch.zeros(T) |


- 绿线的预测显然并不理想。经过几个预测步骤之后,预测的结果很快就会衰减到一个常数。为什么这个算法效果这么差呢?事实是由于错误的累积
- 基于k = 1, 4, 16, 64,通过对整个序列预测的计算,让我们更仔细地看一下k步预测的困难。
1 | max_steps = 64 |

