
1 门控循环单元(GRU)
上一节,我们讨论了如何在循环神经网络中计算梯度,以及矩阵连续乘积可以导致梯度消失或梯度爆炸的问题。下面我们简单思考一下这种梯度异常在实践中的意义:
case1:早期观测值对预测所有未来观测值具有非常重要的意义。例如,第一个观测值包含一个校验和,目标是在序列的末尾辨别校验和是否正确。在这种情况下,第一个词元的影响至关重要。我们希望有某些机制能够在一个记忆元里存储重要的早期信息。如果没有这样的机制,我们将不得不给这个观测值指定一个非常大的梯度,因为它会影响所有后续的观测值。
case2:一些词元没有相关的观测值。例如,在对网页内容进行情感分析时,可能有一些辅助HTML代码与网页传达的情绪无关。我们希望有一些机制来跳过隐状态表示中的此类词元。
case3:序列的各个部分之间存在逻辑中断。例如,书的章节之间可能会有过渡存在。需要一种方法来重置我们的内部状态表示。
对于这类问题,可以使用“长短期记忆”(long‐short‐term memory,LSTM)。门控循环单元(gated recurrent unit,GRU)是一个稍微简化的变体,通常能够提供同等的效果,并且计算速度明显更快。
1.1 门控隐状态
- GRU与普通rnn的关键区别在于:前者支持隐状态的门控。这意味着模型有专门的机制来确定应该何时更新隐状态,以及应该何时重置隐状态。这些机制是可学习的,并且能够解决了上面列出的问题。例如,如果第一个词元非常重要,模型将学会在第一次观测之后不更新隐状态。同样,模型也可以学会跳过不相关的临时观测。最后,模型还将学会在需要的时候重置隐状态。各类门控如下:
1.1.1 重置门(reset gate)和更新门(update gate)
我们把它们设计成(0, 1)区间中的向量,这样就可以进行凸组合。重置门允许我们控制“可能还想记住”的过去状态的数量;更新门将允许我们控制新状态中有多少个是旧状态的副本。
下图描述了门控循环单元中的重置门和更新门的输入,输入是由当前时间步的输入和前一时间步的隐状态给出。两个门的输出是由使用sigmoid激活函数的两个全连接层给出。

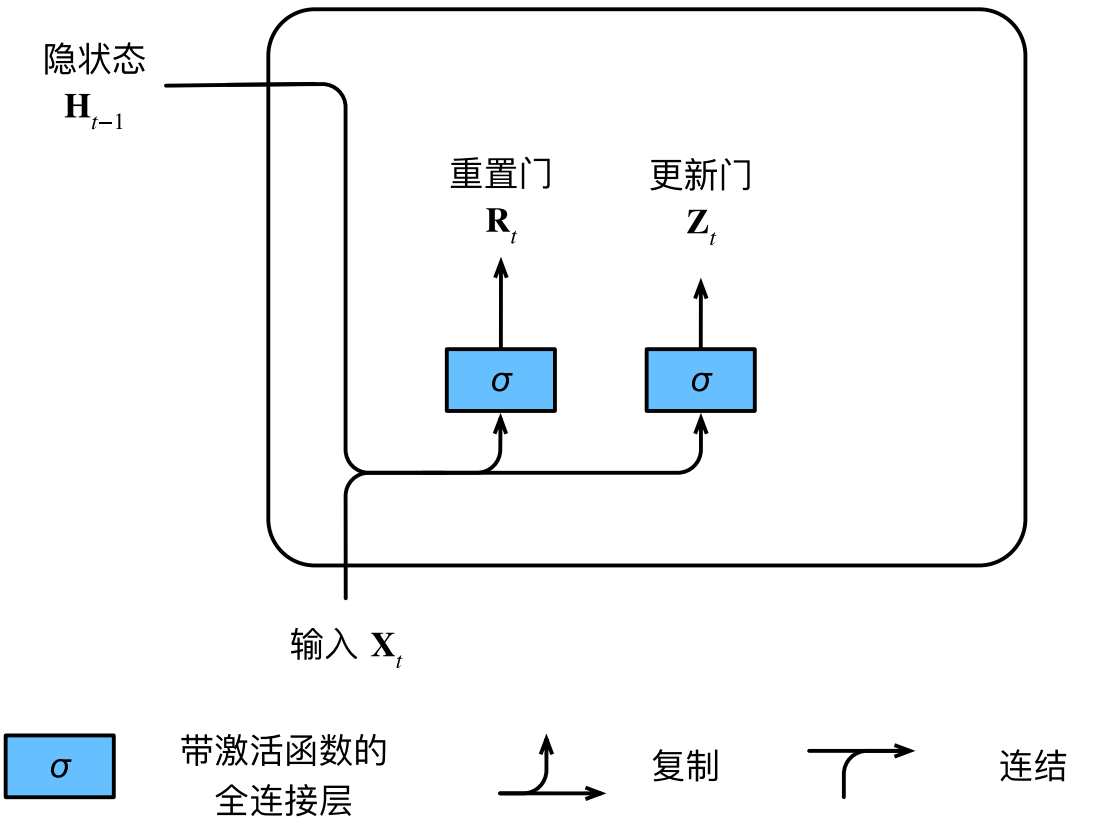
- 假设在时间步t,输入是小批量$ \mathbf{ X } _ { t } \in \mathbb{ R } ^ { n \times d } $(样本数为n,输入个数为d),前一时间步的隐状态是$ \mathbf{ H } _ { t - 1 } \in \mathbb{ R } ^ { n \times h } $(隐藏单元个数为h)。重置门$ \mathbf{ R } _ { t } \in \mathbb{ R } ^ { n \times h } $和更新门$ \mathbf{ Z } _ { t } \in \mathbb{ R } ^ { n \times h } $的计算如下:
$$ \begin{aligned} \mathbf{ R } _ { t } & = \sigma \left( \mathbf{ X } _ { t } \mathbf{ W } _ { x r } + \mathbf{ H } _ { t - 1 } \mathbf{ W } _ { h r } + \mathbf{ b } _ { r } \right) , \\ \mathbf{ Z } _ { t } & = \sigma \left( \mathbf{ X } _ { t } \mathbf{ W } _ { x z } + \mathbf{ H } _ { t - 1 } \mathbf{ W } _ { h z } + \mathbf{ b } _ { z } \right) . \end{aligned} $$
- 在求和过程中会触发广播机制。
1.1.2 候选隐藏状态
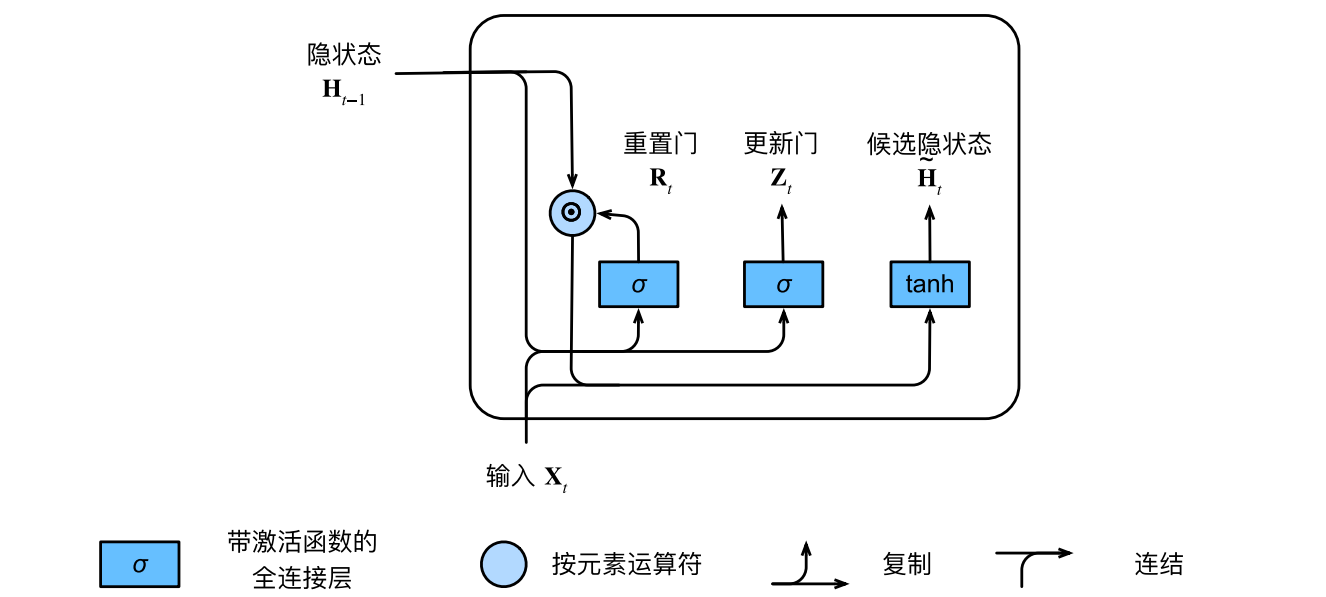
- 将重置门与常规隐状态更新机制集成,得到在时间步t的候选隐状态(candidate hidden state)$ \tilde { \mathbf{ H } } _ { t } \in \mathbb{ R } ^ { n \times h } $:
$$ \tilde { \mathbf{ H } } _ { t } = \tanh \left( \mathbf{ X } _ { t } \mathbf{ W } _ { x h } + \left( \mathbf{ R } _ { t } \odot \mathbf{ H } _ { t - 1 } \right) \mathbf{ W } _ { h h } + \mathbf{ b } _ { h } \right) . $$
- 其中$ \odot $是Hadamard积(按元素乘积)。使用tanh非线性激活函数来确保候选隐状态中的值保持在区间(−1, 1)中。
- 与原始的隐状态更新机制相比,这种方法中的$ \mathbf{ R } _ { t } $和$ \mathbf{ H } _ { t - 1 } $的元素相乘可以减少以往状态的影响。每当重置门$ \mathbf{ R } _ { t } $中的项接近1时,我们恢复一个普通的循环神经网络。对于重置门$ \mathbf{ R } _ { t } $中所有接近0的项,候选隐状态是以$ \mathbf{ X } _ { t } $为输入的多层感知机的输出。因此,任何预先存在的隐状态都会被重置为默认值。应用重置门之后的计算流程:

1.1.3 隐状态
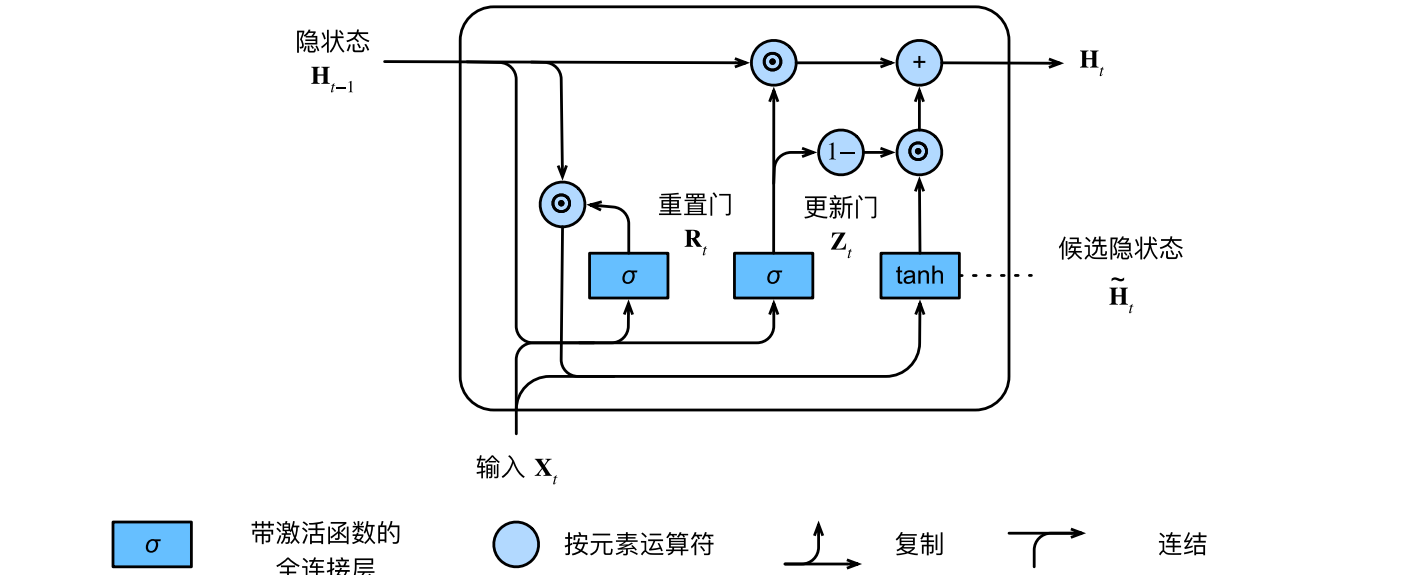
- 上述计算了候选隐状态,我们仍然需要结合更新门$ \mathbf{ Z } _ { t } $的效果。这一步确定新的隐状态$ \mathbf{ H } _ { t } \in \mathbb{ R } ^ { n \times h } $在多大程度上来自旧的状态$ \mathbf{ H } _ { t - 1 } $和在多大程度上来自新的候选状态$ \tilde { \mathbf{ H } } _ { t } $。更新门仅需在$ \mathbf{ H } _ { t - 1 } $和$ \tilde { \mathbf{ H } } _ { t } $之间进行按元素的凸组合就可以实现这个目标:
$$ \mathbf{ H } _ { t } = \mathbf{ Z } _ { t } \odot \mathbf{ H } _ { t - 1 } + ( 1 - \mathbf{ Z } _ { t } ) \odot \tilde { \mathbf{ H } } _ { t } . $$
当更新门$ \mathbf{ Z } _ { t } $接近1时,模型就倾向只保留旧状态,来自$ \matnbf{ X } _ { t } $的信息将被忽略,从而有效地跳过了依赖链条中的时间步t。
当更新门$ \mathbf{ Z } _ { t } $接近0时,新的隐状态$ \mathbf{ H } _ { t } $接近候选隐状态$ \tilde { \mathbf{ H } } _ { t } $。这种情况会重置隐状态,以便在新的时间步中丢弃旧的状态。
这些设计可以帮助我们处理循环神经网络中的梯度消失问题,并更好地捕获时间步距离很长的序列的依赖关系。
更新门起作用后的计算流:

门控循环单元具有以下两个显著特征:
- 重置门有助于捕获序列中的短期依赖关系
- 更新门有助于捕获序列中的长期依赖关系
1.2 从零开始实现
- 读取数据集
1 | import torch |
1.2.1 初始化模型参数
- 从标准差为0.01的高斯分布中提取权重,并将偏置项设为0,超参数num_hiddens定义隐藏单元的数量,实例化与更新门、重置门、候选隐状态和输出层相关的所有权重和偏置。
1 | # 初始化模型参数 |
1.2.2 定义模型
- 定义隐状态的初始化函数init_gru_state。此函数返回一个形状为(批量大小,隐藏单元个数)的张量,张量的值全部为零。
1 | # 初始化隐状态 |
- 定义门控循环单元模型,模型的架构与基本的循环神经网络单元是相同的,只是权重更新公式更为复杂。
1 | # 定义门控循环单元模型 |
1.2.3 训练与预测
- 训练结束后,我们分别打印输出训练集的困惑度,以及前缀“time traveler”和“traveler”的预测序列上的困惑度。
1 | import os |
perplexity 1.1, 23766.8 tokens/sec on cpu
time traveller for so it will be convenient to speak of himwas e
travellerithe thing seei think so murmured the provincial m


1.3 简洁实现
- 这段代码的运行速度要快得多,因为它使用的是编译好的运算符而不是Python来处理之前阐述的许多细节。
1 | num_inputs = vocab_size |
perplexity 1.0, 20716.4 tokens/sec on cpu
time travelleryou can show black is white by argument said filby
travelleryou can show black is white by argument said filby

