2 凸性
- 如果算法在凸性条件设定下的效果很差,那通常我们很难在其他条件下看到好的结果。
1 | %matplotlib inline |
2.1 定义
2.1.1 凸集
对于任何$a, b \in X$,连接a和b的线段也位于X中,则向量空间中的一个集合X是凸(convex)的。
假设X和Y是凸集,那么$X \bigcap Y$也是凸集的
通常,深度学习中的问题是在凸集上定义的。
2.1.2 凸函数
- 给定一个凸集X,如果对于所有$x, x’ \in X$和所有$\lambda \in [0,1]$,函数f是凸的,则:
$$\lambda f(x) + (1 - \lambda) f( x’ ) \geq f( \lambda x + (1 - \lambda) x’)$$
1 | f = lambda x: 0.5 * x**2 # 凸函数 |

2.1.3 詹森不等式
凸性定义的一种推广:
$$\sum_i \alpha_ i f(x_i) \geq f \left( \sum_i \alpha_ i x_ i \right) \text{and} E_ X [ f( X ) ] \geq f ( E_ X [ X ] )$$其中$\alpha_i$是满足$\sum_ i \alpha_i = 1$的非负实数,X是随机变量。
凸函数的期望不小于期望的凸函数
詹森不等式的一个常见应用:用一个较简单的表达式约束一个较复杂的表达式。例如,它可以应用于部分观察到的随机变量的对数似然。具体地说,由于$\int P(Y) P ( X | Y ) d Y = P ( X )$,所以
$$ E_ {Y \sim P ( Y ) } [ -log P ( X | Y ) ] \geq -log P ( X )$$- Y 是典型的未观察到的随机变量,P(Y )是它可能如何分布的最佳猜测,P(X)是将Y 积分后的分布。例如,在聚类中Y 可能是簇标签,而在应用簇标签时,P(X | Y )是生成模型。
2.2 性质
局部极小值是全局极小值
凸函数的下水平集是凸的
凸性和二阶导数
- 当一个函数的二阶导数存在时,我们很容易检查这个函数的凸性。只需$\nabla f ^ 2 \geq 0$,即$ \mathbf{ x }^ T \mathbf{H} \mathbf{ x } \geq 0$
2.3 约束
凸优化的一个很好的特性是能够让我们有效地处理约束。它使我们能够解决以下形式的约束优化问题:
$$\begin{aligned} & minimize \space \space \space f( x ) \\ & subject to c_i ( x ) \leq 0 for \space all \space i \in {1, … ,N } \end{aligned}$$- 其中$c_i$是约束函数
2.3.1 拉格朗日函数
通常,求解一个有约束的优化问题是困难的,解决这个问题的一种方法来自物理中相当简单的直觉。想象一个球在一个盒子里,球会滚到最低的地方,重力将与盒子两侧对球施加的力平衡。简而言之,目标函数(即重力)的梯度将被约束函数的梯度所抵消(由于墙壁的“推回”作用,需要保持在盒子内)。请注意,任何不起作用的约束(即球不接触壁)都将无法对球施加任何力。
上述推理可以通过以下鞍点优化问题来表示:
$$ L ( \mathbf{ x }, \alpha_1 , … , \alpha_ n) = f ( \mathbf{ x }) + \sum_ {i=1} ^ n \alpha_ i c_i ( \mathbf{ x }) \space where \space \alpha_ i \geq 0$$$\alpha$是拉格朗日乘数,它确保约束被正确地执行。选择它们的大小足以确保所有i的$c_ i ( \mathbf { x }) \leq 0$
L的鞍点是原始约束优化问题的最优解
2.3.2 惩罚
- 通常,添加惩罚是确保近似满足约束的一种好方法。在实践中,这被证明比精确的满意度更可靠。此外,对于非凸问题,许多使精确方法在凸情况下的性质(例如,可求最优解)不再成立。
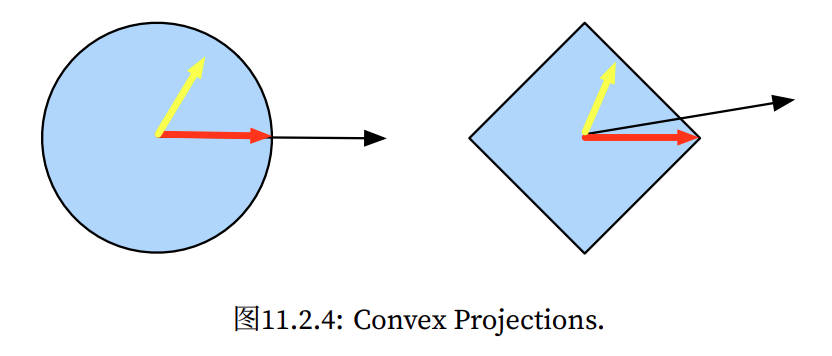
2.3.3 投影
满足约束条件的另一种策略是投影。例如在处理梯度截断时,我们通过$ \mathbf{ g } \leftarrow \mathbf{ g } \cdot min ( 1, \frac{\theta}{||\mathbf{ g }||})$确保梯度的长度以$\theta$为界限。这就是g在半径为$\theta$的球上的投影。
在凸集$\mathbf{ C }$上的投影是
$$Proj_ {\mathbf{ C }} ( \mathbf{ x }) = argmin_{\mathbf{ c’ } \in \mathbf{ C }} || \mathbf{ x } - \mathbf{ c’ }||$$它是凸集中离x最近的点。