
什么是NeRF
NeRF的输入是什么
NeRF的输出是什么
怎么把NeRF的输出转化为一张图片
Loss是怎么计算的
1. 什么是NeRF
使用神经网络(MLP)来隐式存储3D信息的一个presentation(表征)
- 显式的3D信息:有明确的x,y,z值(mesh, voxel体素,点云)
- 比如mesh会使用一个矩阵$\begin{bmatrix} 1,2,3 \\ 2,3,4 \\3,4,5 \\ 4,5,6 \end{bmatrix}$ 表示有四个顶点,与这四个顶点的xyz坐标。使用$\begin{bmatrix} 1,2,3 \\ 1,2,4 \end{bmatrix}$ 表示有两个表面(三角形)顶点1,2,3之间有连接,顶点1,2,4之间有连接。
- 隐式的3D信息:无明确的x,y,z值,智能输出指定角度的2D图片。
- 显式的3D信息:有明确的x,y,z值(mesh, voxel体素,点云)
训练时使用给定场景下的若干张图片。
推论
- 模型不具有泛化能力
- 一个模型智能存储一个3D信息
2. NeRF模型结构
| 问题 | 回答 | 解释 |
|---|---|---|
| 模型是什么 | 8层MLP | |
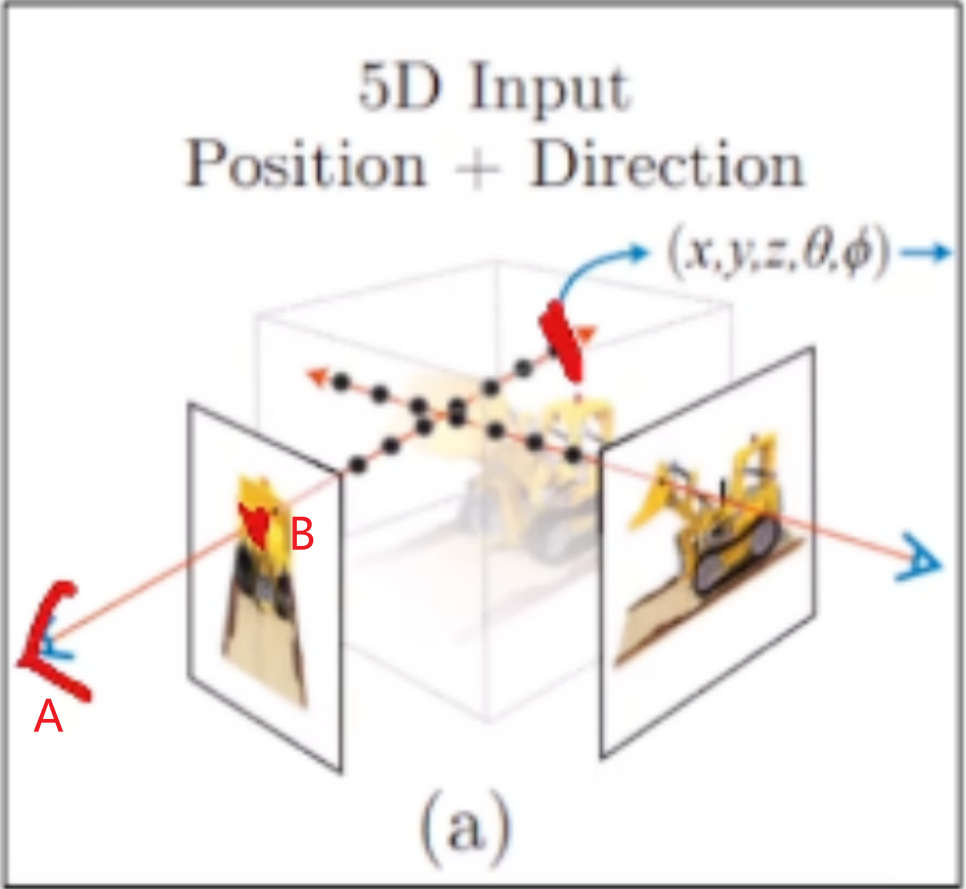
| 模型输入 | 5D向量,$(x,y,z,\theta,\phi)$ | 这是粒子的空间位姿 $\theta$表示方向,它可以由两个向量相减得到,因此输入也可以理解为6D |
| 模型输出 | 4D向量,(密度,颜色) | 这是粒子对应的颜色以及密度 颜色包括RGB |
- 什么是粒子?
- 输入不应该是图片吗?
- 说明应该有一个图片转5D的前处理
- 输入是谁的位姿?相机的吗?
- 输出不应该是2D图片吗?
- 还应该有一个4D转2D图像的后处理
- 怎么从4D向量变成图片的?
- NeRF的重点是前/后处理,模型简单。
3. 什么是粒子?
3.1 相机模型
延申到真实场景和相机模型
真实场景:我们看到东西的时候他会通过多个反射源去打光,然后物体和物体之间也会折射和反射,这些光最后都会打进我们的眼睛。
多个光源
物体折射/反射

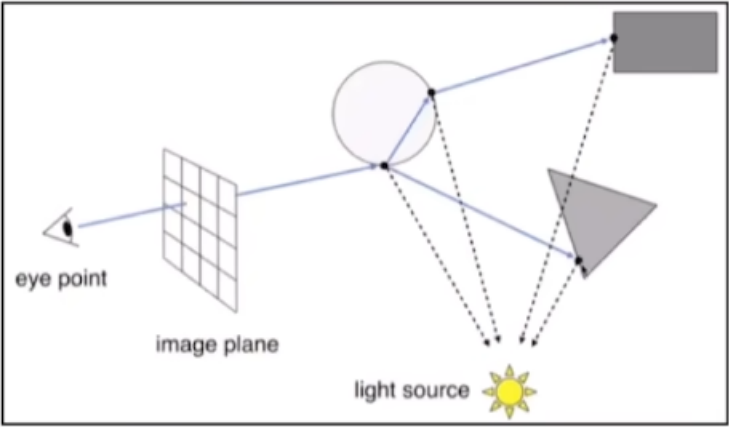
对上面的整个过程进行建模得到的就是一个相机模型:连接3D世界与2D图片
世界坐标系
相机坐标系
归一化相机坐标系(物理成像平面)(CCD)
像素坐标系

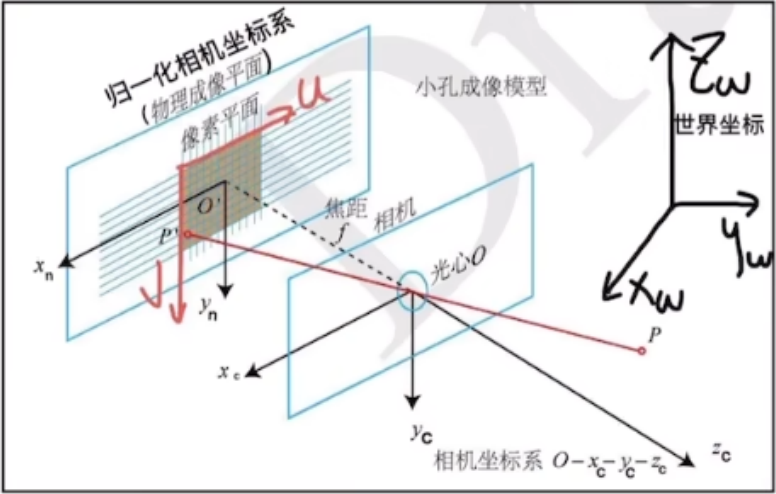
我们常说的3D建模(3D重建)就是通过图片去推测光源的位置和强度,以及物体的几何性质(比如他的材质)。这样操作建模难度巨大。在NeRF中就引入了一个概念:体渲染
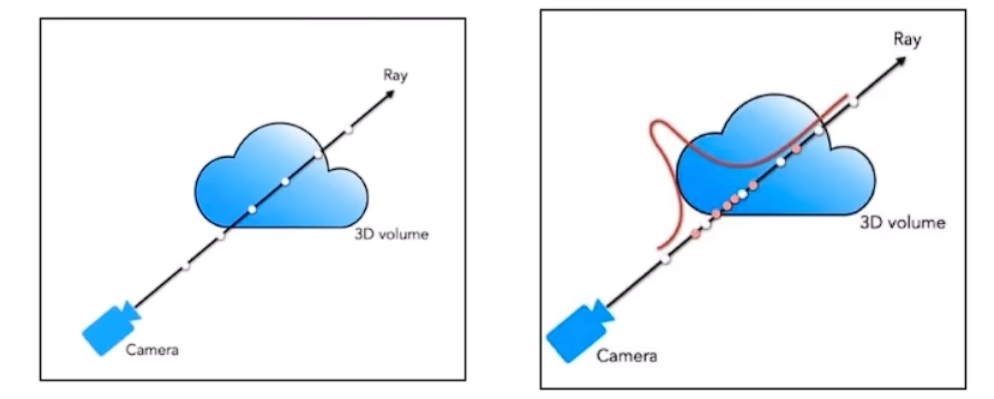
3.2 体渲染
渲染技术的一个分支,在CG领域中,它是为了解决非刚体(云、烟、果冻)(刚体通常有较大密度)的渲染。我们通常将非刚体抽象成一团飘忽不定的粒子群。
对于这些非刚体,他在成像的时候是光线在穿过的时候会光子和粒子发生一些碰撞。光子和粒子在发生作用的过程中会有四个过程:
- 吸收:光子被粒子吸收了
- 放射:粒子本身也会发光
- 外射光:其他例子向我们反射过来的光
- 内射光:我们对其他物体折射的光
NeRF假设:
- 物体是一团自发光的粒子
- 粒子有颜色和密度
- 外射光和内射光抵消
- 多个粒子被渲染成指定角度的图片
3.3. NeRF的输入输出
模型的输入:将物体进行稀疏表示的单个粒子的位姿
模型输出:该粒子的密度和颜色
问题:
- 模型看上去输入的还是一张图片,输出的也应该是一张图片,我们准备的训练集里面的图片在哪呢?
- 怎么得到这些粒子?
- 多少个粒子?这些例子怎么批量输入?
- 这些粒子是怎么渲染成新的图片的 ?
3.4 粒子的采集
对于空间中的某一个发光粒子:
空间坐标为:(x,y,z)
发射的光线通过相机模型成为图片上的像素坐标(u,v)
粒子颜色即为像素颜色
(u,v)与)(x,y,z)的公式:相机坐标=相机内参x转换矩阵x世界坐标
$$
\begin{bmatrix} u \\ v \\ 1 \end{bmatrix} = \begin{bmatrix} f_x \space \space 0 \space \space c_x \space \space 0 \\ 0 \space \space f_y \space \space c_y \space \space 0 \\ 0 \space \space 0 \space \space 1 \space \space 0 \end{bmatrix}_ { 3 \times 4 } \begin{bmatrix} R \space \space T \\ 0 \space \space 1 \end{bmatrix}_ { 4 \times 4} \begin{bmatrix} x_w \\ y_w \\ z_w \\ 1 \end{bmatrix}_ { 4 \times 1}
$$
反之,已知观察点A,图片上的像素点B,我们可以找到一条射线。对于图片上的某一个像素(u,v)的颜色:
- 可以看作射线上无数个发光点的“和”
- 可以利用相机模型,反推射线
- 这个射线表示为:$r( t ) = o + td$ :
- $o$ 为射线原点
- $d$ 为方向
- $t$ 为距离
- 极坐标表示
- 理论上:t从0到正无穷
- 对于整张图片有(H,W)条射线

由像素点P(u,v)反推射线

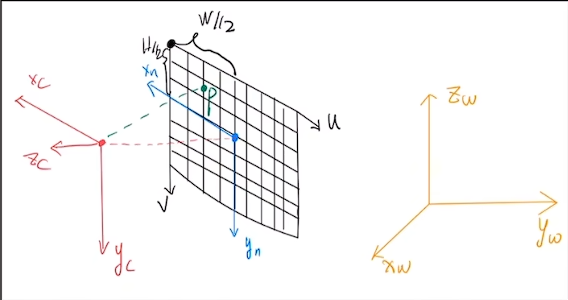
像素平面坐标系:$(u,v)$
物理成像平面坐标系:$(x_n , y_n)$
- 像素平面 -> 物理成像平面:$(x_n, y_n) = (-(u - \frac{w}{2}), v- \frac{h}{2})$
相机坐标系$(x_c , y_c , z_c)$
- 物理成像平面 ->相机坐标系:$( x_c, y_c, z_c)=( x_n, y_n, -f)$
- 归一化:$( x_c, y_c, z_c)=( \frac{x_ c}{ f }, \frac{y_ c }{ f }, -1)$
- f是焦距
世界坐标系$(x_w , y_w , z_w)$
- 相机坐标系 ->世界坐标系:$( x_w, y_w, z_w)=W_{c2w} \cdot ( x_c, y_c, z_c)$
相机位置(世界坐标)已知,像素点世界坐标已知,就可以得到射线的方程,表达射线上的每一个点
代码:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33import torch
import numpy as np
# 根据像素点获取射线
def get_rays(H, W, K, c2w):
i,j = torch.meshgrid( #坐标系索引
torch.linspace(0,W-1,W), #从0到W-1,一共w个数
torch.linspace(0,H-1,H)
)
# print(i,j)
i,j = i.t(), j.t()
# print(i,j)
dirs = torch.stack( #归一化的相机坐标
#K[0][0]是f焦距, K[0][2]是w/2,K[1][2]是H/2,K[1][1]是焦距
[(i-K[0][2]) / K[0][0] , -(j-K[1][2]) / K[1][1] , -torch.ones_like(i)],
-1
)
# Rotate ray directions from camera frame to the world frame
# 射线的方向
rays_d = torch.sum(dirs[..., np.newaxis, :] * c2w[:3,:3] , -1) #doct product, equals to: [c2w.dot(dir) for dir in dirs]
# Translate camera frame's origin to the world frame. It is the origin of all rays.
# 原点
rays_o = c2w[:3,-1].expand(rays_d.shape)
return rays_o,rays_d
# 通常训练不需要全部像素点,只需要采样一定数量的射线
coords = torch.reshape(coords, [-1,2]) #[HW,2]
select_inds = np.random.choice(coords.shape[0], size=[N_rand], replace=False) #[N_rand,]
select_coords = coords[select_inds].long() #[N_rand, 2]
rays_o = rays_o[select_coords[:, 0], select_coords[:, 1]] #[N_rand, 3]
rays_d = rays_d[select_coords[:, 0], select_coords[:, 1]] #[N_rand, 3]
batch_rays = torch.stack([rays_o, rays_d], 0)
target_s = target[select_coords[:, 0], select_coords[:, 1]] #[N_rand, 3]理论上,由于射线无限长,t可以取0到正无穷,且可以连续。实际上t是取连续的,而且范围怎么选择呢?
设置near=2,far=6,在near和far之间均匀采样64个点
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15N_sample = 64
t_vals = torch.linspace(0. , 1. , steps=N_sample)
z_vals = near * (1. - t_vals) + far * (t_vals)
# 添加扰动
if perturb > 0.:
# get intervals between samples
mids = .5 * (z_vals[..., 1:] + z_vals[..., :-1])
upper = torch.cat([mids, z_vals[..., -1:]], -1)
lower = torch.cat([z_vals[..., :1], mids], -1)
# stratified samples in those intervals
t_rand = torch.rand(z_vals.shape)
z_vals = lower + (upper - lower) * t_rand
# r(t) = o + dt
pts = rays_o[..., None, :] + rays_d[..., None,:] * z_vals[...,:,None] #[N_rays, N_samples, 3]
问题:
- 图片呢?怎么得到这些粒子?
- 从图片和相机位姿计算射线
- 从涉嫌上采样粒子
- 多少个粒子,这些粒子怎么批量输入?
- 训练时,一张图片取1024个像素,得到1024条射线,每条射线上采样64个粒子
- 共1024*64个粒子,粒子以batch形式输入模型 [1024*64, 3]
- 模型的输入
- 将物体进行稀疏表示的粒子的位姿
- 模型的输出
- 该粒子的密度和颜色
- 图片呢?怎么得到这些粒子?
1 | # 方向向量单位化 |
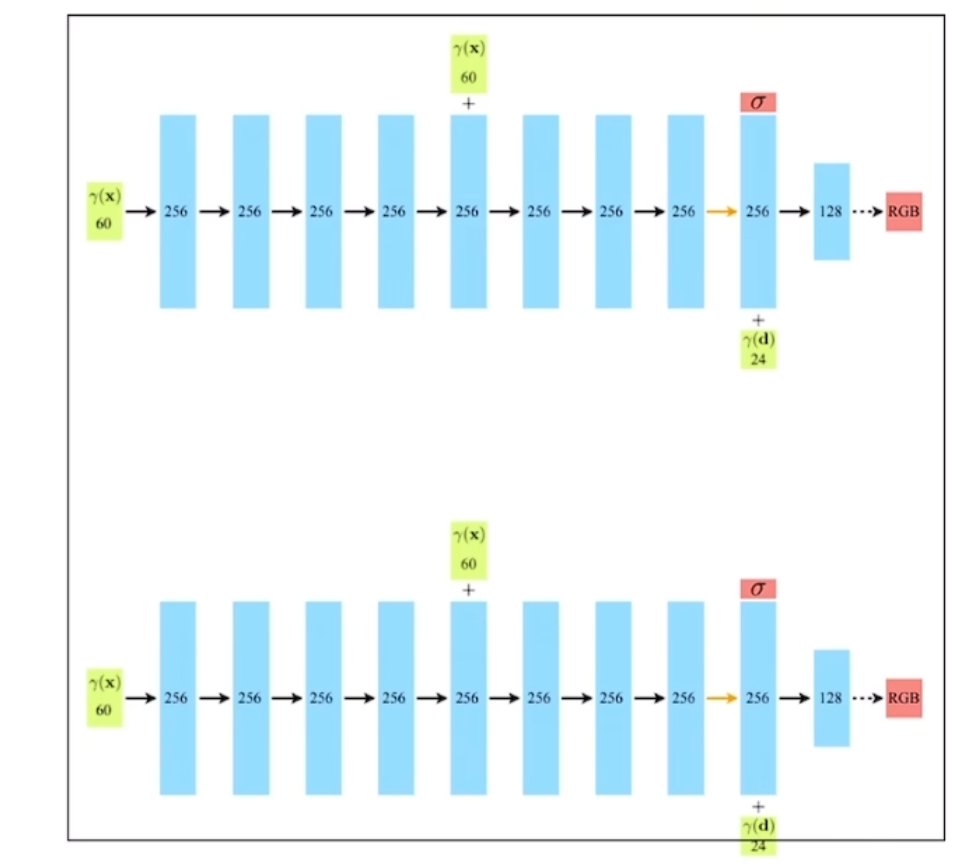
4. 模型结构

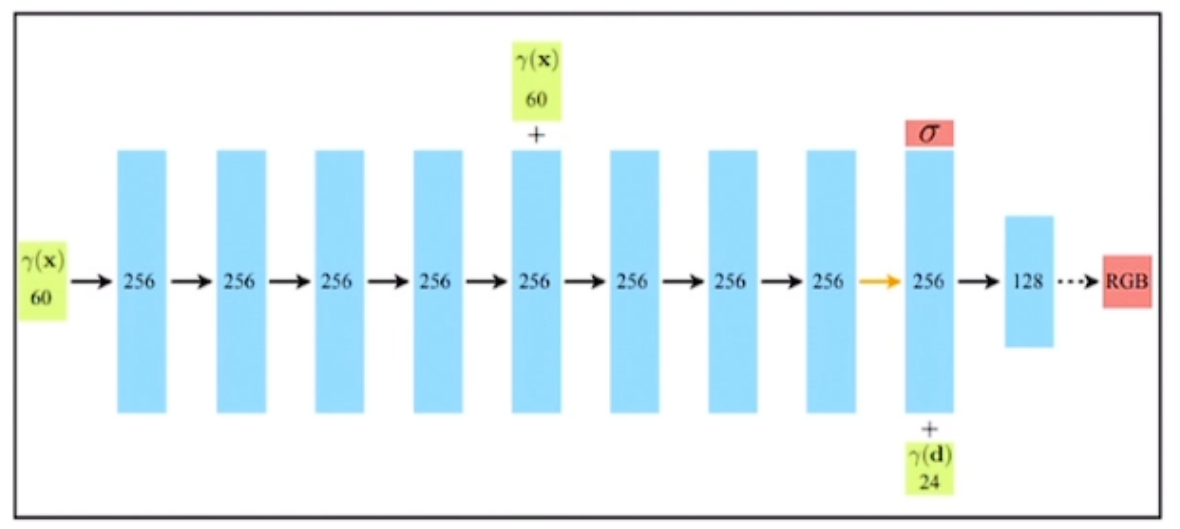
8层全连接
首先输入的是一个60D的向量,半路再次输入位置坐标
后半路输出密度$\sigma$
后半路输入方向视角(24D)
最后输出颜色RGB
输入为什么是60D和24D?上面讨论的输入不是5D吗?
4.1 位置编码
实验发现,当只输入(3D位置,3D视角)时,建模结果细节丢失。缺乏高频信息。因此需要引入位置编码:
$$
r(p) = ( sin(2^0 \pi p), cos(2^0 \pi p), … , sin(2^{L-1} \pi p), cos(2^{L-1} \pi p) )
$$- $p$需要归一化到[-1,1]
- 对于空间坐标$\mathbf{x}$,设定L=10,由于空间位置是3D,所以$r(\mathbf{x})$ 是3*2*10 = 60D
- 对于视角坐标$\mathbf {d}$,设定L=4,$r(\mathbf{d})$ 是3*2*4 = 24D
- 在代码中,加上初始值:$r(\mathbf{x})$ 是 63D;$r(\mathbf{d})$ 是 27D
- 为什么这里位置的L设置的比视角的L大?
- 猜测:对于一个粒子来说他的空间坐标的重要性大于他的视角,所以说在模型结构里输出密度的时候还没加入方向信息,说明粒子的密度只跟它自己本身的绝对空间坐标有关系,跟视角无关;但是颜色在各个角度是不一样的
4.2 损失函数
采用自监督:
- GT是图片某一像素的RGB
- 将该像素对应射线上的粒子颜色进行求和
- 粒子的颜色和:该像素颜色的预测值
- [粒子的颜色和]与像素颜色做MSE
- $L=\sum_ {r \in R} || \hat C ( r ) - C ( r ) ||^ 2 _ 2$
- $R$是每个batch的射线(1024条)
4.2.1 粒子如何求和
假设有粒子A和B,A在B的前面,如果A异常明亮,那么B的光就不会显示了
$$
\begin{align} \hat { C ( s ) } &= \int 0 ^ {+ \infty} T ( s ) \sigma( s ) C ( s ) ds \\ T(s) &= e ^ {- \int 0 ^ {s} \sigma( t ) dt} \end{align}
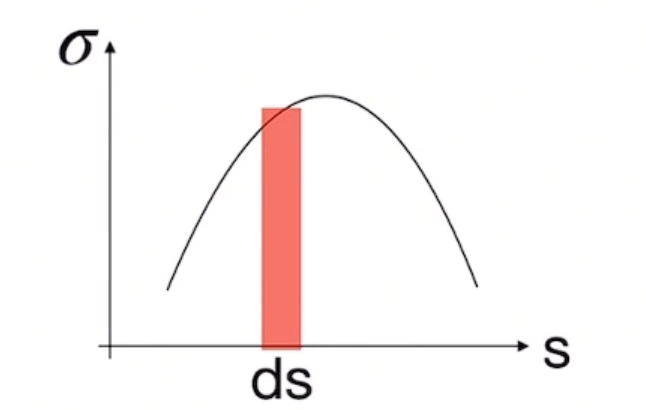
$$$T(s)$:在s点之前,光线没有被阻挡的概率
$\sigma(s)$:在s点处,光线撞击粒子(光线被粒子阻挡)的概率密度(光被吸收的概率)
$C(s)$:在s点处,粒子光出的颜色
各点的颜色和概率密度已知
$T(s)$的推导:

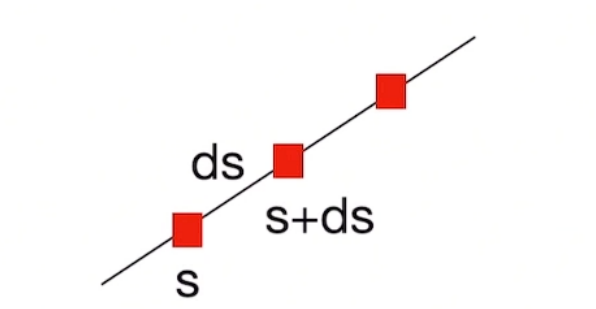

- 对于点$s+ds$,它不被遮挡的概率是:点s不被遮挡且$ds$这一段也都不被遮挡,由于$ds$很小,$ds$这一段被遮挡的概率都视作$\sigma(s)$
$$
\begin{aligned}
T(s + ds ) &= T( s )[ 1 - \sigma ( s ) ds] \\
T(s + ds ) &= T ( s ) - T ( s ) \sigma( s ) ds \\
T ( s + ds ) - T ( s ) &= -T( s ) \sigma( s ) ds \\
dT( s ) &= -T( s ) \sigma( s ) ds \\
\frac{ d T ( s )}{T ( s )} &= - \sigma( s ) ds \\
\int_0 ^t \frac{dT ( s )}{T( s )} &= \int_0 ^ t - \sigma( s ) \\
\int_0 ^t \frac{1}{T( s )} dT ( s ) &= \int_0 ^ t - \sigma( s ) \\
\text{ ln } T ( s ) |0 ^t &= \int_0 ^ t - \sigma( s ) \\
\text{ ln } T ( t ) - \text{ ln } T ( 0 ) &= \int_0 ^ t - \sigma( s ) \\
\text{ ln } T ( t ) &= \int_0 ^ t - \sigma( s ) \\
T(t) &= e ^ {- \int 0 ^ {t} \sigma( s ) ds}
\end{aligned}
$$
4.2.2 离散情况下粒子求和 ($\alpha$-blending)
将光线[0,s]划分为N各等间距区间$[ T_ n \rightarrow T_{ n + 1 }]$
n=0,1,2,…,N
间隔长度为$\delta_ n$
假设区间内密度$\sigma_ n $和颜色$C_ n$固定
$$
\begin{aligned}
\hat C( r ) &= \sum_{ i = 1} ^ N T_ i ( 1 - e^ {-\sigma_ i \delta_ i} ) c_ i \\
T_i &= e^ { - \sum_{ j = 1 } ^{ i - 1 } \sigma_ j \delta_ j }
\end{aligned}
$$我们认为最后的颜色是每一小段光区贡献的光强的累加和:$\hat C = \sum_ { n = 0 } ^ N I ( T_ n \rightarrow T_ {n + 1 })$ 。对于其中的某一段:
$$
\begin{aligned}
I( t_ n \rightarrow t_ { n + 1}) &= \int_{ t_ n } ^ { t_ { n + 1 } } T ( t ) \sigma_n C_n dt \\
&= \sigma_ n C_ n \int { t n } ^ { t_ { n+ 1 } } T ( t ) dt \\
&= \sigma_ n C_ n \int { t n } ^ { t_ { n+ 1 } } e^ { - \int_ 0 ^ t \sigma ( s ) ds } dt \\
&= \sigma_ n C_ n \int { t n } ^ { t_ { n+ 1 } } e^ { - \int_ 0 ^ { t_ n } \sigma ( s ) ds } e^ { - \int_ { t_ n} ^ t \sigma ( s ) ds } dt \\
&= \sigma_ n C_ n T ( 0 \rightarrow t_ n ) \int { t n } ^ { t_ { n+ 1 } } e^ { - \int_ { t_ n} ^ t \sigma ( s ) ds } dt \\
&= \sigma_ n C_ n T ( 0 \rightarrow t_ n ) \int { t n } ^ { t_ { n+ 1 } } e^ { - \int_ { t_ n} ^ t \sigma_ n ds } dt \\
&= \sigma_ n C_ n T ( 0 \rightarrow t_ n ) \int { t n } ^ { t_ { n+ 1 } } e^ { - \sigma_ n ( t - t_ n ) } dt \\
&= \sigma_ n C_ n T ( 0 \rightarrow t_ n ) [- \frac{1}{ \sigma_ n } e^ { - \sigma_ n ( t - t_ n ) } |_ { t _ n } ^ { t_ n + 1 } ] \\
&= C_ n T ( 0 \rightarrow t_ n ) ( 1 - e ^ { - \sigma_ n \delta_ n} ) \\
&= C_ n T( t_ n ) ( 1 - e ^ { - \sigma_ n \delta_ n} ) \\
&= C_ n e^ { - \int _ 0 ^ { t_ n} \sigma ( s ) ds } ( 1 - e ^ { - \sigma_ n \delta_ n} ) \\
&= C_ n e^ { - \sum _ {i = 0 } ^ { n - 1 } \sigma_ i \delta_ i } ( 1 - e ^ { - \sigma_ n \delta_ n} ) \\\end{aligned}
$$令$\alpha_ n = 1 - e ^ { - \sigma_ n \delta_ n }$最终:
$$
\begin{aligned}
\hat C &= \sum_ { n = 0 } ^ N I ( T_ n \rightarrow T_ {n + 1 }) \\
&= \sum_ { n = 0 } ^ N C_ n e^ { - \sum _ {i = 0 } ^ { n - 1 } \sigma_ i \delta_ i } ( 1 - e ^ { - \sigma_ n \delta_ n} ) \\
&= \sum_ { n = 0 } ^ N C_ n \alpha_ n ( 1 - \alpha_ 0 ) ( 1 - \alpha_ 1 )…( 1 - \alpha_ { n - 1 } )
\end{aligned}
$$1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20# delta_n
dists = z_vals[..., 1:] - z_vals[..., :-1]
dists = torch.cat( [dists, torch.Tensor([1e10]).expand(dists[..., :1].shape)], -1)
dists = dists * torch.norm(rays_d[... , None, :], dim = -1 ) #[N_rays, N_samples]
noise = 0
if raw_noise_std > 0.:
noise = torch.randn(raw[..., 3].shape) * raw_noise_std
# 得到alpha, raw模型输出,(1024,4)前3维为rgb,后一维为密度
raw2alpha = lambda raw, dists, act_fn = F.relu: 1.-torch.exp(-act_fn(raw) * dists)
alpha = raw2alpha(raw[..., 3] + noise, dists) # [N_rays, N_samples]
# alpha_0, [alpha_1 * (1-alpha_0)]
# torch.cumpord 累乘
weights = alpha * torch.cumprod( torch.cat([ torch.ones(( alpha.shape[0], 1)), 1.-alpha + 1e-10], -1) , -1)[:, :-1]
# 颜色权重累加
rgb = torch.sigmoid( raw[..., :3]) # [N_rays, N_samples, 3]
rgb_map = torch.sum(weights[..., None ] * rgb, -2) #[N_rays, 3]
4.3 模型输出
- 问题:这些粒子是怎么渲染成新的图片的?
- 分别计算图片中每一个像素的颜色
- 计算该像素对应的光线和粒子
- 将这些粒子通过公式累加
- 得到该像素最终颜色
4.4 模型结构2
问题:
由于之前采用的是均匀采样,会采样到无效区域(空白区域和遮挡区域),我们希望有效区域多采样,无效区域少采样。

解决:
可以根据概率密度进行二次采样。
实际上NeRF由两个模型组成:
- 粗模型:输入均匀采样粒子,输出密度
- 细模型:根据密度,二次采样
最后输出是采用模型2的输出,粗模型和细模型结构相同

先根据粗模型的结果,进行逆变换采样。首先根据公式$\hat C = \sum_ { n = 0 } ^ N C_ n \alpha_ n ( 1 - \alpha_ 0 ) ( 1 - \alpha_ 1 )…( 1 - \alpha_ { n - 1 } )$ 取粒子颜色前的权重做softmax:
$$w = \alpha_ n ( 1 - \alpha_ 0 ) ( 1 - \alpha_ 1 )…( 1 - \alpha_ { n - 1 } ) \\ \hat w_i = \frac{ w_ i }{ \sum _ {j = 1 } ^ {N _ c } w_ i}$$
此时,新的权重和为1,可看作概率密度函数,生成他的cdf
然后得到反函数 invert cdf
用均匀分布drand48()生成一个随机数:invert(drand48)=r,得到的r就是符合pdf分布的随机数。
对于每条光线,重新采样128个粒子,与之前的64个粒子加在一起,即每条光线采样192个粒子。
5. 推理
- 输入:h*w条射线上分别采样64个点
- 输出:h*w*192*4
- 根据4这个维度($RGB\sigma$)进行体渲染
6. 总结
6.1 训练流程
前处理:
- 将图片中的每个像素通过相机模型找到对应的射线
- 每条射线上进行采样,得到64个粒子
- 对1024*64个粒子进行位置编码
- 位置坐标$x,y,z$ -> 63D
- 方向向量$x’, y’, z’$ -> 27D
模型1:
- 8层MLP
- 输入为[1024, 64, 63] 和 [1024, 64, 27]
- 输出为[1024, 64, 4]
后处理1:
- 计算模型1的输出,对射线进行二次采样
- 每条射线上共采样192个粒子
模型2:
- 8层MLP
- 输入为[1024, 192, 63] 和 [1024, 192, 27]
- 输出为[1024, 192, 4]
后处理2:
- 将模型2的输出通过体渲染,转换为像素
6.2 核心内容
体渲染
- 支撑了整个NeRF的核心,前面怎么做的前处理,后面怎么做的后处理其实都是基于体渲染去衍生的,它其实就是在体渲染的基础上加了一个模型
位置编码
- 使生成的图片不丢失细节信息
层级采样
- 前面一个粗模型进行粗采样,后面一个细模型进行细采样
6.3 缺点
- 很慢,训练/推理都慢
- 只能表达静态场景
- 对光照处理的一般
- 没有泛化能力