
- 抛雪球是从3D到像素的过程
- NeRF中使用了一个相机模型进行坐标系转换:
- 世界坐标系
- 相机坐标系
- 归一化坐标系
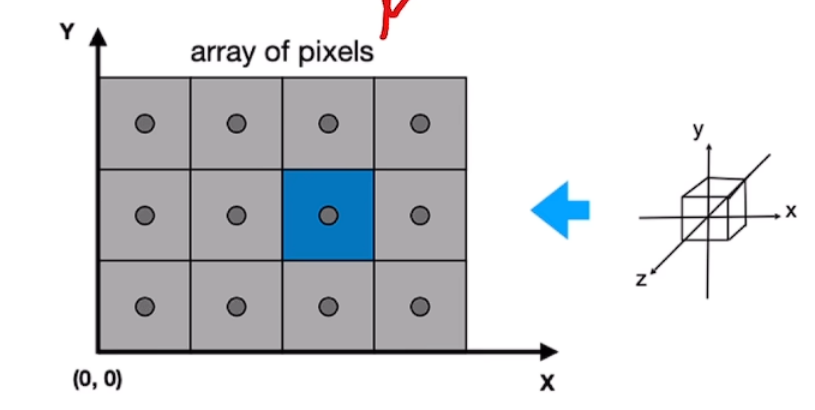
- 像素坐标系
- CG中有一个更常用的转换:
- 观测变换
- 世界坐标系 -> 相机坐标系
- 投影变换
- 相机坐标系 -> 2D空间
- 视口变换
- 光栅化
- 观测变换
1. 观测变换
假设有一个高斯椭球,我们从不同的角度去看它可能有不同的形态,这个过程的本质还是一个仿射变换

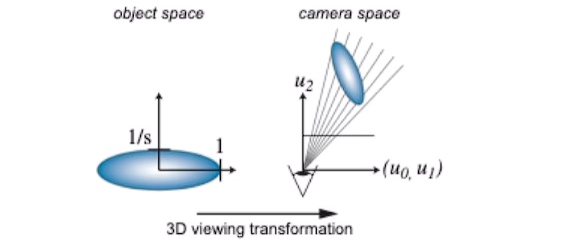
- 从世界坐标系到相机坐标系
- 横看成岭侧成峰,远近高低各不同
- 仿射变换
- $\mathbf{ w } = A \mathbf{ x }+ b$
2. 投影变换
变换到相机角度之后,我们需要将高斯椭球映射到成像平面上,映射方法有两个:正交投影,透视投影

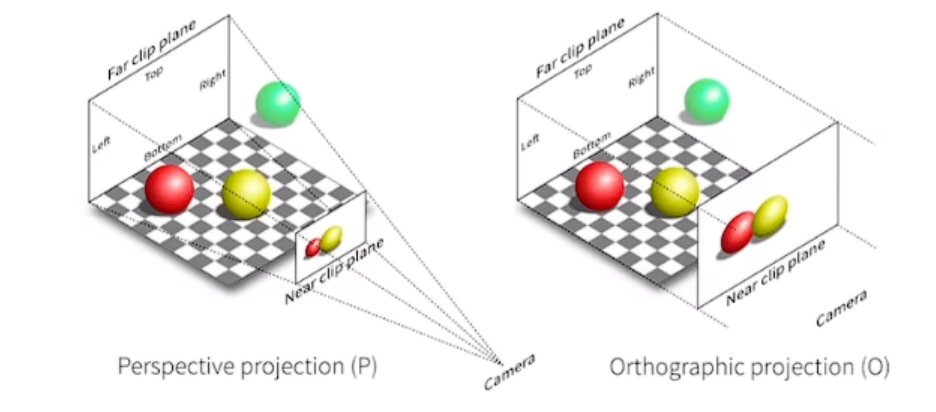
- 3D到2D
- 正交投影,与z无关
- 与深度无关,没有远小近大(图右)
- 透视投影,与z相关
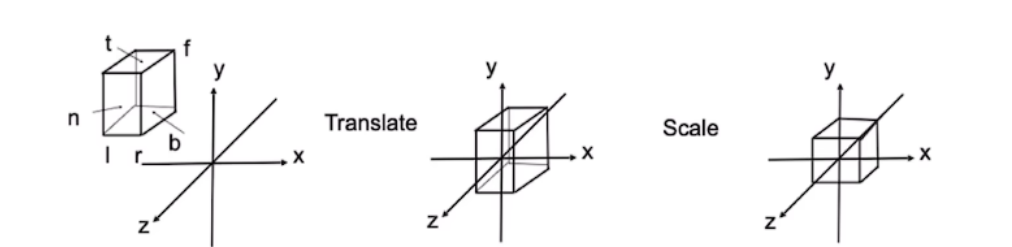
2.1 正交投影
- 立方体$[l,r] \times [b,t] \times [f,n]$
- 平移到原点
- 立方体缩放至$[-1,1]^ 3$的正方体
- 仿射变换

$$
M_ { ortho } =
\begin{bmatrix}
\frac{ 2 }{ r - l } &0 &0 &0 \\
0 &\frac{ 2 }{ t - b } &0 &0 \\
0 &0 &\frac{ 2 }{ n - f } &0 \\
0 &0 &0 &1 \\
\end{bmatrix}
\begin{bmatrix}
1 &0 &0 &- \frac{ r+l }{2} \\
0 &1 &0 &- \frac{ t+b }{2} \\
0 &0 &1 &- \frac{ n+f }{2} \\
0 &0 &0 &1
\end{bmatrix} =
\begin{bmatrix}
\frac{ 2 }{ r - l } &0 &0 &-\frac{ r + l }{ r - l } \\
0 &\frac{ 2 }{ t - b } &0 &-\frac{ t + b }{ t - b } \\
0 &0 &\frac{ 2 }{ n - f } &-\frac{ n + f }{ n - f } \\
0 &0 &0 &1 \\
\end{bmatrix}
$$
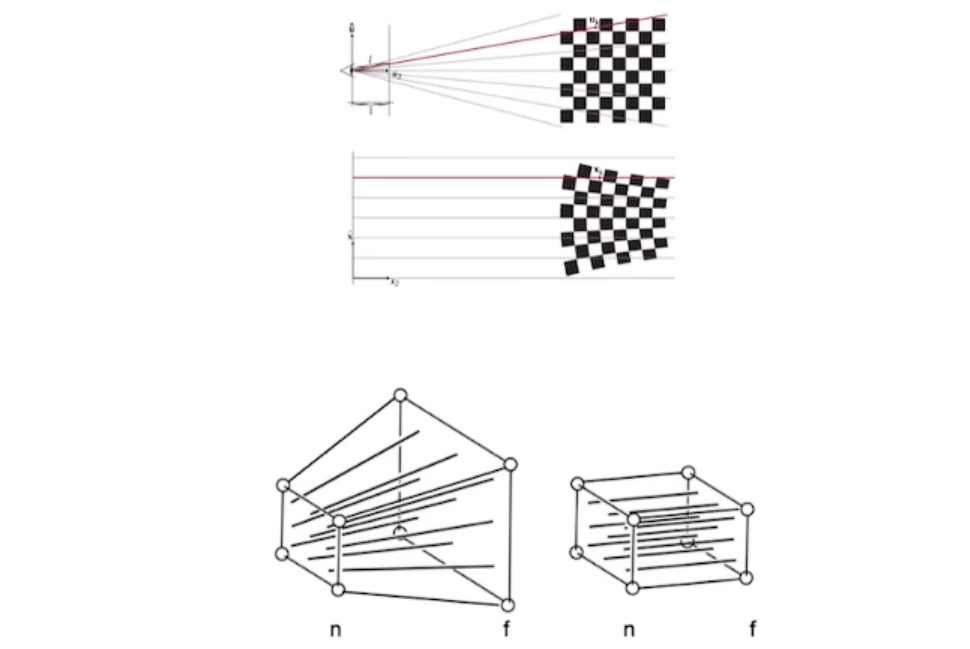
2.2 透视投影
远小近大
先把锥体(视锥)“压”程立方体
再做正交投影

$$
M_ {persp \rightarrow ortho} = \begin{bmatrix} n &0 &0 &0 \\ 0 &n &0 &0 \\ 0 &0 &n+f &-nf \\ 0 &0 &1 &0 \end{bmatrix}
$$问题:
- 透视投影是非线性的,即非仿射变换,我们希望高斯椭球一直进行仿射变换
可以发现投影变换将一个立方体压成了一个正方体,这个过程中w和h的缩放比是不同的,肯定是有一个形变的,这个形变在后面视口变换会解决。
3. 视口变换
经过投影变换之后我们得到了一个$[-1,1]^ 3$范围的正方体,我们再把它拉伸回最开始的$h \times w$大小
进行拉伸:
与z无关
将$[-1,1]^ 2$的举行变换至$[0,w] \times [0,h]$

$$
M_{ viewport } = \begin{bmatrix} \frac{ w } { 2 } &0 &0 &\frac{ w } { 2 } \\
0 &\frac{ h } { 2 } &0 &\frac{ h } { 2 } \\
0 &0 &1 &0 \\
0 &0 &0 &1
\end{bmatrix}
$$
3.1 光栅化
但是还有一个问题:比如mesh中的一个面片他是连续的,但是我们想把这个东西画到屏幕的时候,屏幕是离散的,这时就需要光栅化
定义:
把东西画在屏幕上
连续转离散
使用的方法:采样,看像素的中心点有没有落在面片里

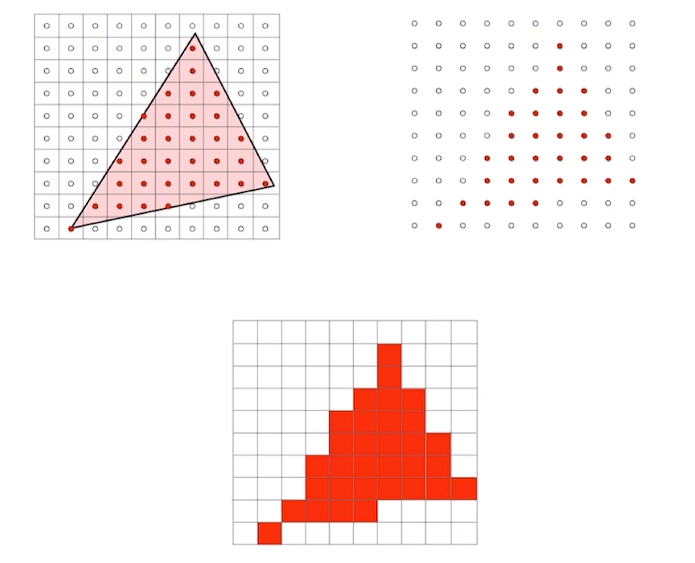
光栅化中经常听到一个词叫形变(Aliasing),比如上图左下角那个像素有点离群,那我们的采样方式可能有点问题,可以采取其他的采样方式使他更自然。
1 | # 对空间中的三个点做光栅化 |
4. 对3d高斯进行变换
4.1 3d高斯的观测变换
在物理坐标系中,一个3d高斯有如下要素:
- 高斯核中心(均值):$t_k = [t_ 0,t_ 1, t_ 2]^ T$
- 协方差矩阵:$V_k ‘’$
- 高斯核:$r_ k ‘’ ( t ) = G_ { v_ k ‘’ } ( t - t_k )$
观测变换将3d高斯从世界坐标系变到相机坐标系,这是一个仿射变换:
- 高斯核中心:$u_ k = [u_ 0, u_ 1, u_ 2]^ T$
- 均值:$u_ k = W t_k + d$
- 协方差矩阵:$V_k’ = WV_k’’ W^ T$
- 高斯核:$r_ k ‘ (u ) = G_ { v_ k ‘} ( u - u_ k )$
4.2 3d高斯的投影变换
投影变换将锥体压成立方体,然后压成正方体:$x = m( t )$,这个过程是非线性的,且有形变
上一步:
- 均值:$u_ k = [ u_ 0, u_ 1, u_ 2] ^ T$
- 协方差:$V_k ‘$
高斯核中心:$x_ k = [x_ 0, x_ 1, x_ 2]^ T$
高斯核:$r_ k ( x ) = G_ { V_ k } ( x - x_ k )$
均值:$x_ k = m( u_ k )$
- 对均值来说,它可以这样做,因为它只是一个点他不会形变
协方差矩阵?
- 协方差矩阵不能直接用投影变换得到,因为投影变换是非线性变换,非仿射变换
- 因此需要引入雅可比矩阵
- 这里可以理解成拆成两步:
- 通过雅可比矩阵实现近似的压缩(从视锥压缩成立方体
- 再做正交投影
- 这里可以理解成拆成两步:
4.2.1 雅可比矩阵
泰勒展开
线性逼近
例子:
假设有一个坐标(x,y),对他进行一个非仿射变换:
$$
\begin{align}
f_ 1 ( x ) = x + sin( y ) \\
f_ 2( y ) = y + sin ( y )
\end{align}
$$这样导致从一个横平竖直的坐标系变成了一个带弯曲的坐标系:(关注某一个点,比如(-2,1)这个点变到了黄色框这个位置,展开这个小框,中心点是(-2,1),其他附近的变换是非线性变化,

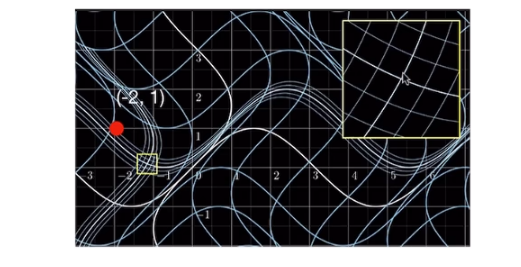
假设把黄色框框进一步缩小,它附近的变换可以近似成一个线性的变换:

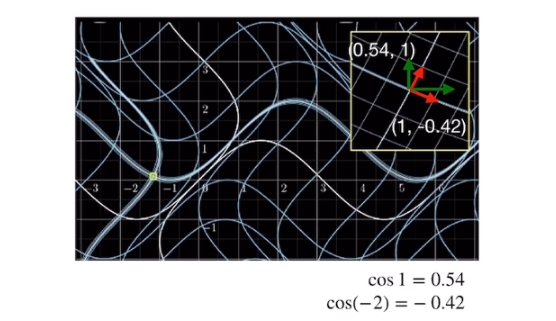
也就是说确定了一个点$x_ 0 , y_ 0$,在他附近就可以通过导数去进行线性的逼近了。具体就叫雅可比矩阵:
$$
J = \begin{bmatrix} \frac{ df_ 1 }{ dx } &\frac{ df_ 1 }{ dy } \\ \frac{ df_ 2 }{ dx } &\frac{ df_2 }{ dy } \end{bmatrix} = \begin{bmatrix} 1 & cos( y ) \\ cos( x ) &1 \end{bmatrix}
$$
4.2.2 基于雅可比矩阵的投影变换
协方差矩阵:$V_ k = J V_k ‘ J^ T = JWV_k’’W^ T J^ T$
已知对于投影变换中的一个点,第一步进行压缩:
$$
\left ( \begin{matrix} n&0 &0 &0 \\
0 &n &0 &0 \\ 0 &0 &n+f &-nf \\
0 &0 &1 &0
\end{matrix} \right) \times \left ( \begin{matrix} x \\
y \\ z \\
1
\end{matrix} \right) = \left ( \begin{matrix} nx \\
ny \\ ( n+ f) z -nf \\
z
\end{matrix} \right) =\left ( \begin{matrix} \frac{ nx }{ z } \\
\frac{ ny }{ z } \\ (n+f)-\frac{ nf }{ 2 } \\
1
\end{matrix} \right)
$$我们发现变换关系是:
$$
\begin{bmatrix} f_ 1( x ) \\ f_ 2( y ) \\ f_ 3( z ) \end{bmatrix} = \begin{bmatrix} \frac{ nx }{ z } \\ \frac{ ny }{ z } \\ ( n+f ) - \frac{ nf }{ z } \end{bmatrix}
$$因此可以求雅可比矩阵(通常带入的是3d高斯的中心点):
$$
J = \begin{bmatrix} \frac{ n }{ z } &0 &-\frac{ nx }{ z^ 2 } \\ 0 &\frac{ n }{ z } &-\frac{ ny }{ z^2 } \\ 0 &0 &-\frac{ nf }{ z^ 2 } \end{bmatrix}
$$
变换之后,均值和协方差在一个坐标系里吗?
- 均值在NDC坐标系中,[-1,1]的立方体中
- 对于协方差矩阵来说,上面的操作只是将锥体压缩到立方体的一个过程,还没有放到[-1,1]立方体中,所以后面还原的时候,均值需要做视口变换,而协方差不需要
4.3 3d高斯的视口变换
视口变换只需要对高斯核的中心去做,不用对协方差做,因为前面对协方差做投影变换的时候其实没做完
- 投影变换之后:
- 高斯核中心:$x_ k = [ x_ 0 ,x_ 1, x_ 2 ]^ T$
- 高斯核:$r_ x ( x ) = G_ { V_ k }( x - x_ k )$
- 足迹函数
- 像素坐标系:
- 高斯核中心:$\mu = [ \mu_ 1, \mu_ 2, \mu_ 3 ]^ T$
- 平移+缩放
- 对协方差:足迹渲染:离散计算(距离均值越近它的值就越大)
- $G( \hat x ) = exp \left ( -\frac{ 1 }{ 2 }( x - \mu )^ T V_ k ^ { -1 } ( x - \mu) \right)$
- 高斯核中心:$\mu = [ \mu_ 1, \mu_ 2, \mu_ 3 ]^ T$